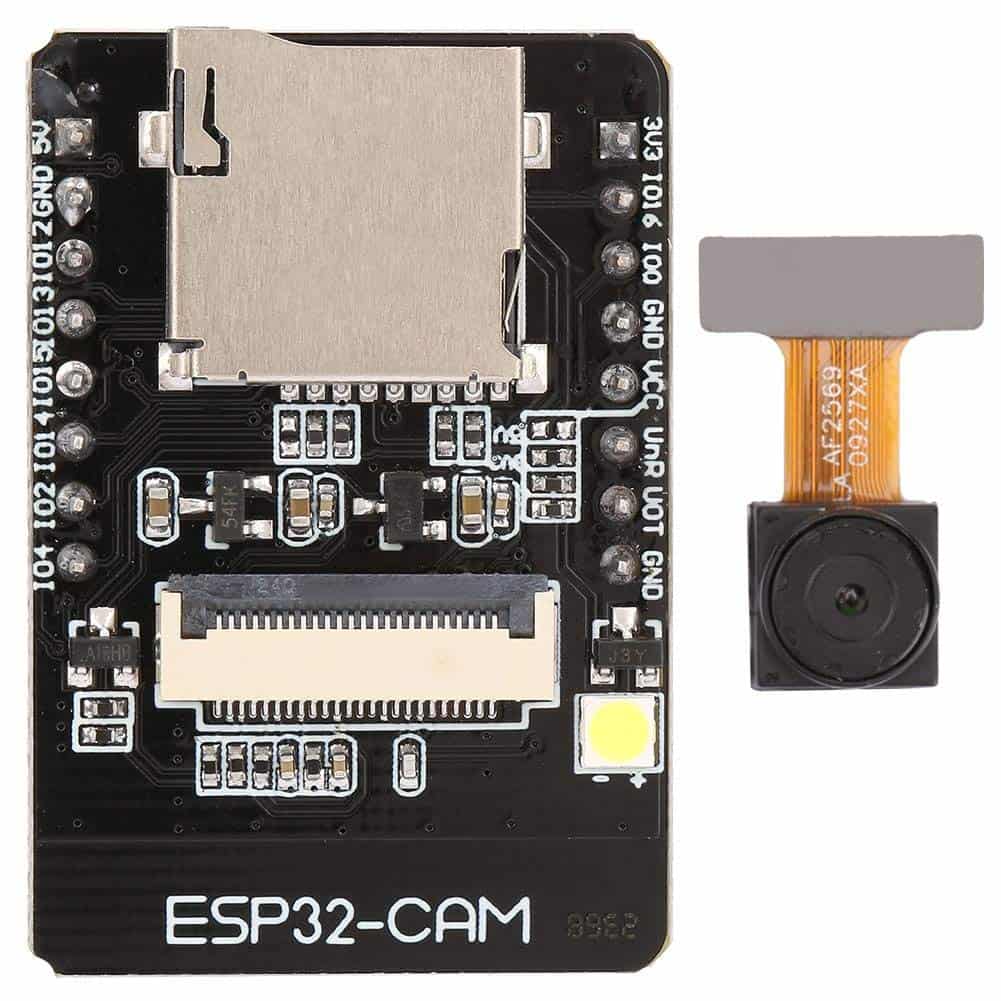
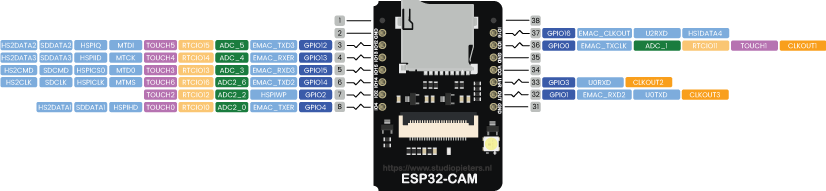
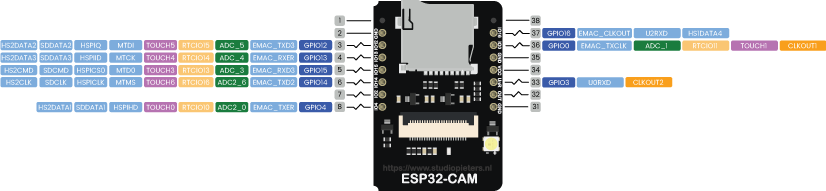
In this post, we’ll be taking a closer look at the ESP32-CAM hardware, and more specifically, the ESP32-CAM pinout. ESP32-CAM is based on the Single-core Xtensa LX7 CPU, up to 240 MHz. The ESP32-CAM pinout consists of 16 pins. The versatility of the pinout provides many different options such as driving motors, LED’s, reading sensors and more. In this post, we’ll go over the capabilities of the ESP32 CAM pinout.
Power Supply
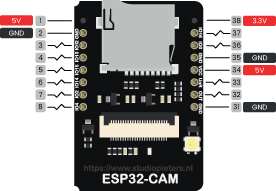
The ESP32-CAM comes with three GND pins (colored in black color) and two power pins (colored with red color): 3.3V and 5V.
Note: You can power the ESP32-CAM through the 3.3V or 5V pins. However, many people reported errors when powering the ESP32-CAM with 3.3V, so we always advise to power the ESP32-CAM through the 5V pin.
Power output pin
There’s also the pin labeled on the silkscreen as VCC. You should not use that pin to power the ESP32-CAM. That is an output power pin. It can either output 5V or 3.3V.
In our case, the ESP32-CAM outputs 3.3V whether it is powered with 5V or 3.3V. Next to the VCC pin, there are two pads. One labeled as 3.3V and other as 5V. If you look closely, you should have a jumper on the 3.3V pads. If you want to have an output of 5V on the VCC pin, you need to unsolder that connection and solder the 5V pads.
GND
The GND pins are used to close the electrical circuit and provide a common logic reference level throughout your circuit. Always make sure that all GNDs (of the Arduino, peripherals and components) are connected to one another and have a common ground.
RESET
You can find 1 reset button on theback of the ESP32-CAM.

Analog
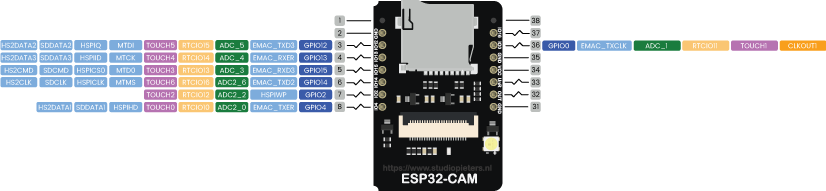
The ESP32-CAM has 7 x 12 bits ADC input channels. These are the GPIOs that can be used as ADC and respective channels.
Analog to Digital Conversion
ADC stands for Analog to Digital Converter. ADC is an electronic circuit used to convert analog signals into digital signals. This digital representation of analog signals allows the processor (which is a digital device) to measure the analog signal and use it through its operation. The ESP32 Pins ADC1_X and ADC2_X are capable of reading analog voltages. The ADC converts voltage into bits which the microprocessor can understand.
- ADC2_CH0 (GPIO 4)
- ADC2_CH1 (GPIO 0)
- ADC2_CH2 (GPIO 2)
- ADC2_CH3 (GPIO 15)
- ADC2_CH4 (GPIO 13)
- ADC2_CH5 (GPIO 12)
- ADC2_CH6 (GPIO 14)
Note: ADC2 pins cannot be used when Wi-Fi is used. So, if you’re using Wi-Fi and you’re having trouble getting the value from an ADC2 GPIO.
The ADC input channels have a 12 bit resolution. This means that you can get analog readings ranging from 0 to 4095, in which 0 corresponds to 0V and 4095 to 3.3V. You also have the ability to set the resolution of your channels on the code, as well as the ADC range.
The ESP32 ADC pins don’t have a linear behavior. You’ll probably won’t be able to distinguish between 0 and 0.1V, or between 3.2 and 3.3V. You need to keep that in mind when using the ADC pins.
Digital Pins
All of the ESP32-CAM serve as digital input/output pins.
Note: Each pin can provide up to 40 mA max. But the recommended current is 20 mA. The absolute max current provided (or sank) from all pins together is 200mA.
Digital
Digital is a way of representing voltage in 1 bit: either 0 or 1.Tthese pins on the ESP32-CAM are pins designed to be configured as inputs or outputs according to the needs of the user. The Digital pins are either on or off. When ON they are in a HIGH voltage state of 3.3V and when OFF they are in a LOW voltage state of 0V. When the digital pins are configured as output, they are set to 0 or 3.3 volts.
Between 0-3.3 volts which is converted into digital representation (0 or 1). To determine this, there are 2 thresholds: Below 0.8v – considered as 0. Above 2v – considered as 1. When connecting a component to a digital pin, make sure that the logic levels match. If the voltage is in between the thresholds, the returning value will be undefined.
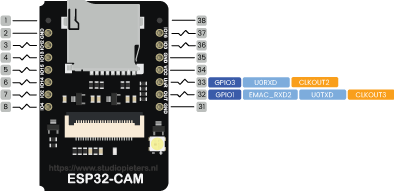
Serial Communication
Serial communication is used to exchange data between the Arduino board and another serial device such as computers, displays, sensors and more. Each ESP32 board has at least one serial port. Serial communication occurs on digital pins 0 (RX) and 1 (TX) as well as via USB. ESP32 supports serial communication through digital pins with the SoftwareSerial Library as well. This allows the user to connect multiple serial-enabled devices and leave the main serial port available for the USB.
SPI
SPI – SS/SCK/MISO/MOSI pins are the dedicated pins for SPI communication. Serial Peripheral Interface (SPI) is a serial data protocol used by microcontrollers to communicate with one or more external devices in a bus like connection. The SPI can also be used to connect 2 microcontrollers. On the SPI bus, there is always one device that is denoted as a Master device and all the rest as Slaves. In most cases, the microcontroller is the Master device. The SS (Slave Select) pin determines which device the Master is currently communicating with. SS/SCK/MISO/MOSI pins are the dedicated pins for SPI communication. SPI enabled devices always have the following pins:
MISO (Master In Slave Out) – A line for sending data to the Master device
MOSI (Master Out Slave In) – The Master line for sending data to peripheral devices
SCK (Serial Clock) – A clock signal generated by the Master device to synchronize data transmission.
SS (Slave Select) pin determines which device the Master is.
By default, the pin mapping for SPI is:
| SPI | MOSI | MISO | CLK | CS |
| HSPI | GPIO 13 | GPIO 12 | GPIO 14 | GPIO 15 |
Interrupt
An external interrupt is a system interrupt that occurs when outside interference is present. Interference can come from the user or other hardware devices in the network. Common uses for these interrupts in ESP32-CAM are reading the frequency a square wave generated by encoders or waking up the processor upon an external event. on the ESP32-CAM, all GPIOs can be configured as interrupts.
Capacitive touch GPIOs
The ESP32-CAM has 7 internal capacitive touch sensors. These can sense variations in anything that holds an electrical charge, like the human skin. So they can detect variations induced when touching the GPIOs with a finger. These pins can be easily integrated into capacitive pads, and replace mechanical buttons. The capacitive touch pins can also be used to wake up the ESP32-CAM from deep sleep.
Those internal touch sensors are connected to these GPIO’s.
- T0 (GPIO 4)
- T1 (GPIO 0)
- T2 (GPIO 2)
- T3 (GPIO 15)
- T4 (GPIO 13)
- T5 (GPIO 12)
- T6 (GPIO 14)

RTC GPIOs
There is RTC GPIO support on the ESP32-CAM. The GPIOs routed to the RTC low-power subsystem can be used when the ESP32-CAM is in deep sleep. These RTC GPIOs can be used to wake up the ESP32-CAM from deep sleep when the Ultra Low Power (ULP) co-processor is running. The following GPIOs can be used as an external wake up source.
- RTC_GPIO0 (GPIO36)
- RTC_GPIO3 (GPIO39)
- RTC_GPIO4 (GPIO34)
- RTC_GPIO12 (GPIO2)
- RTC_GPIO13 (GPIO15)
- RTC_GPIO14 (GPIO13)
- RTC_GPIO15 (GPIO12)
- RTC_GPIO16 (GPIO14)
Strapping Pins
The ESP32-CAM chip has the following strapping pins:
- GPIO 0
- GPIO 2
- GPIO 4
- GPIO 5 (must be HIGH during boot)
- GPIO 12 (must be LOW during boot)
- GPIO 15 (must be HIGH during boot)
These are used to put the ESP32-CAM into bootloader or flashing mode. On most development boards with built-in USB/Serial, you don’t need to worry about the state of these pins. The board puts the pins in the right state for flashing or boot mode.
However, if you have peripherals connected to those pins, you may have trouble trying to upload new code, flashing the ESP32-CAM with new firmware or resetting the board. If you have some peripherals connected to the strapping pins and you are getting trouble uploading code or flashing the ESP32, it may be because those peripherals are preventing the ESP32-CAM to enter the right mode. After resetting, flashing, or booting, those pins work as expected.
Pins HIGH at Boot
Some GPIO’s change its state to HIGH or output PWM signals at boot or reset. This means that if you have outputs connected to these GPIOs you may get unexpected results when the ESP32-CAM resets or boots.
- GPIO 1
- GPIO 3
- GPIO 14
- GPIO 15
GPIO current drawn
The absolute maximum current drawn per GPIO is 40mA according to the “Recommended Operating Conditions” section in the ESP32 datasheet.
ESP32-CAM Built-In Hall Effect Sensor
The ESP32 also features a built-in hall effect sensor that detects changes in the magnetic field in its surroundings.
Camera Connections
Additionally, there are pins with specific features that make them not suitable or not for a specific project. The connections between the camera and the ESP32-CAM are shown in the following table.
| OV2640 CAMERA | ESP32 | Variable name in code |
| D0 | GPIO 5 | Y2_GPIO_NUM |
| D1 | GPIO 18 | Y3_GPIO_NUM |
| D2 | GPIO 19 | Y4_GPIO_NUM |
| D3 | GPIO 21 | Y5_GPIO_NUM |
| D4 | GPIO 36 | Y6_GPIO_NUM |
| D5 | GPIO 39 | Y7_GPIO_NUM |
| D6 | GPIO 34 | Y8_GPIO_NUM |
| D7 | GPIO 35 | Y9_GPIO_NUM |
| XCLK | GPIO 0 | XCLK_GPIO_NUM |
| PCLK | GPIO 22 | PCLK_GPIO_NUM |
| VSYNC | GPIO 25 | VSYNC_GPIO_NUM |
| HREF | GPIO 23 | HREF_GPIO_NUM |
| SDA | GPIO 26 | SIOD_GPIO_NUM |
| SCL | GPIO 27 | SIOC_GPIO_NUM |
| POWER PIN | GPIO 32 | PWDN_GPIO_NUM |
Overview
The ESP32-CAM Microcontroller is one of the most versatile boards on the market today and that’s why we decided to focus on it in this guide. This guide displays most of its capabilities, but there are also more advanced options which we did not go into in this post.
The important thing to know when you choose a board for your project is its capabilities and limitations. It’s also important to understand the different communication protocols that the board uses. Of course, you don’t need to remember all of this information, you can always go back to this post and read the relevant information for you (this is a good time to bookmark this Blog btw).
Download
Download the ESP32-CAM Reference sheet for free!

Reference:
Espressif, Technical specifications for the ESP32, https://www.espressif.com/sites/default/files/documentation/esp32_technical_reference_manual_en.pdf Espressif , Technical specifications for the ESP32, https://www.espressif.com/sites/default/files/documentation/esp32_datasheet_en.pdf RandomNerdTutorials, ESP32 Pinout Reference,Which GPIO pins should you use, https://randomnerdtutorials.com/esp32-pinout-reference-gpios