After a good first start in my previous blog, I had to find another motor with more torque or some other kind of solution so my big (heavy) blinds wil open and close. So time for Blinds 2.0.
NEMA 17
At first I had some old 5V NEMA 17 Stepper (STP-43D1016) lying around so I tried these. I just simply connected the NEMA 17 motor to the ULN2003A shield and this just worked fine. Then I got excited, was it this simple? I draw a new 3D Enclosure and printed it. Time to test if the blinds works. As soon as I held the tube from the blinds it became obvious this will not work because the stepper will not hold the blinds up when there is no power on the spools, time to figure out another solution.
28BYJ-48
In the original design I used the 28BYJ-48 Stepper motor. but this Motor didn’t had enough torque. Now this kind of motor is not really up-to-date with modern technology. Unipolar stepper motors are not that common anymore. Bipolar steppers are twice as efficient with the same amount of copper on the internal windings. Even in full stepping mode, a unipolar stepper still has 2 out of four wires not active all the time. So basically, if there was a way to run current through all windings in the motor at all times, the thing would be stronger and faster. So the question was: can I convert a Unipolar stepper to a Bipolar? The answer is YES!

Unipolar Stepper vs Bipolar Stepper
Both uni-polar and Bipolar steppers are used widely in projects. However, they have their own advantages and disadvantages from the application point of view. The advantage of a uni-polar motor is that we do not have to use a complex H bridge circuitry to control the stepper motor. Only a simple driver like ULN2003A will do the task satisfactorily. But, there is one disadvantage of uni-polar motors. The torque generated by them is quite less. This is because the current is flowing only through the half the winding. Hence they are used in low torque applications. On the other hand, bipolar stepper motors are a little complex to wire as we have to use a current reversing H bridge driver IC like an L293D. But the advantage is that the current will flow through the full coil. The resulting torque generated by the motor is larger as compared to a uni-polar motor.
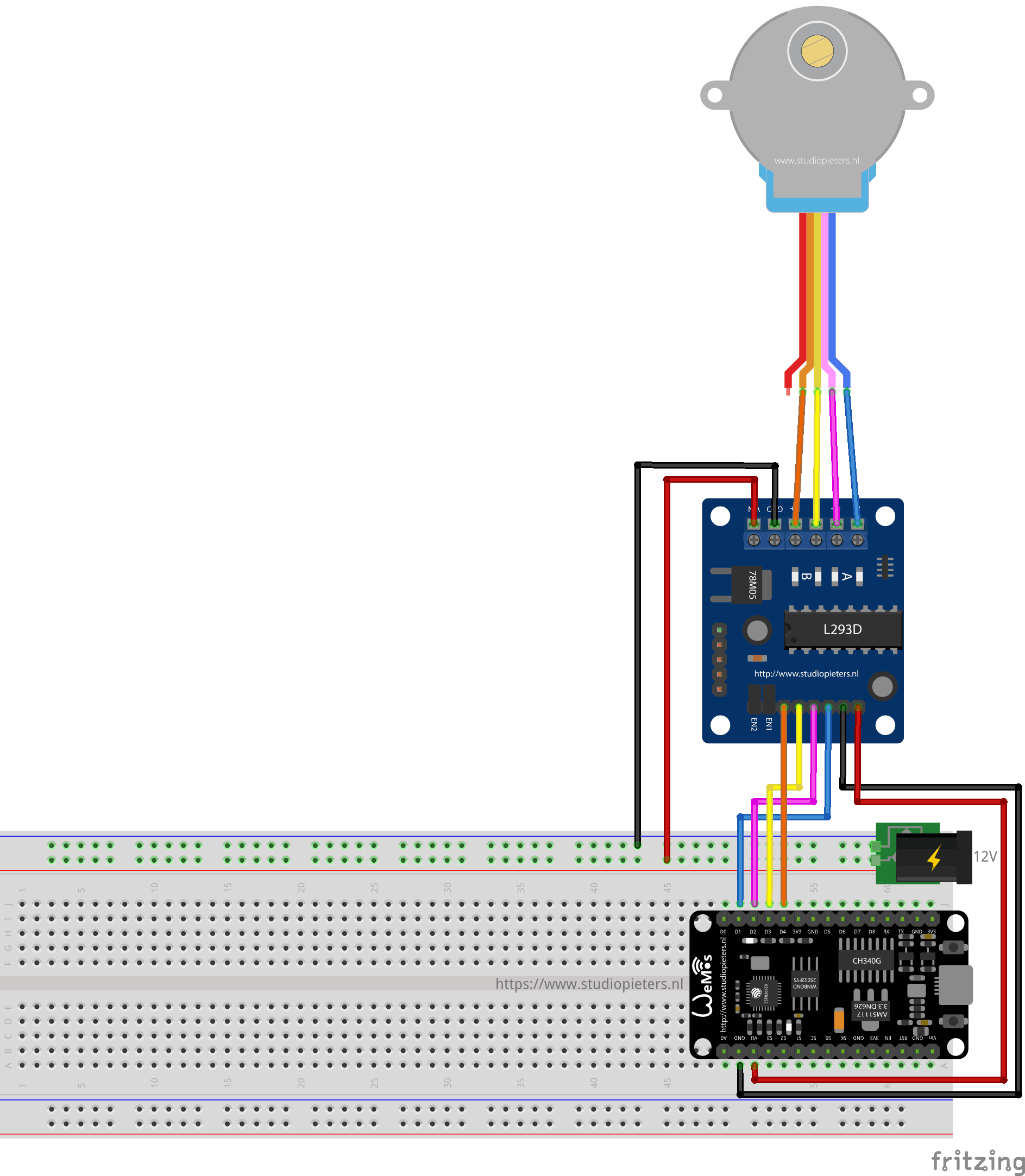
L293D
A bipolar stepper motor has one winding per stator phase. A two phase bipolar stepper motor will have 4 leads. In a bipolar stepper we don’t have a common lead like in a uni-polar stepper motor. Hence, there is no natural reversal of current direction through the winding.
A bipolar stepper motor has easy wiring arrangement but its operation is little complex. In order to drive a bipolar stepper, we need a driver IC with an internal H bridge circuit. This is because, in order to reverse the polarity of stator poles, the current needs to be reversed. This can only be done through a H bridge. There are two other reasons to use an H Bridge IC
The current draw of a stepper motor is quite high. The micro-controller pin can only provide up to 15 mA at maximum. The stepper needs current which is around ten times this value. A external driver IC is capable of handling such high currents. Another reason why H Bridge is used is because the stator coils are nothing but inductor. When coil current changes direction a spike is generated. A normal micro-controller pin cannot tolerate such high spikes without damaging itself. Hence to protect micro-controller pins, H bridge is necessary. The most common H Bridge IC used in most Bipolar stepper interfacing projects is L293D.
Interfacing to Micro-Controller
4 micro-controller pins are required to control the motor. We need to provide the L293D with 5 V supply as well as the voltage at which the motor needs to operate. Since we will be using both the drivers of the IC, we will assert the enable pin for both of them.
There are three different ways in which we can drive the bipolar stepper motor. Only one of the phase winding are energized at a time. That is, either AB or CD is energized. Of course the coils will be energized in such a way that we get correct polarity. But only one phase is energized. This type of stepping will give less holding torque because only one phase is energized. In this method, both the phases are activated at the same time. The rotor will align itself between two poles. This arrangement will give higher holding torque than the previous method. The third method is used for half stepping. This method is used generally to improve the stepping angle. Here, in step 1 only 1 phase is ON, then in step 2, 2 phases are ON, then again only one phase is ON and the sequence continues.
Scheme
Code
#include <Stepper.h> #include <ESP8266mDNS.h> #include <PubSubClient.h> #include <WiFiUdp.h> #include <ArduinoOTA.h> #include <WiFiManager.h> #include <ArduinoJson.h> #include "FS.h" #include <WiFiClient.h> #include <WebSocketsServer.h> // Version number for checking if there are new code releases and notifying the user String version = "1.2.0"; //Configure Default Settings for AP logon String APid = "AutoConnectAP"; String APpw = "StudioPieters"; //Fixed settings for WIFI WiFiClient espClient; PubSubClient psclient(espClient); //MQTT client String mqttclientid; //Generated MQTT client id char mqtt_server[40]; //WIFI config: MQTT server config (optional) char mqtt_port[6] = "1883"; //WIFI config: MQTT port config (optional) String outputTopic; //MQTT topic for sending messages String inputTopic; //MQTT topic for listening boolean mqttActive = true; char config_name[40]; //WIFI config: Bonjour name of device String action; //Action manual/auto int path = 0; //Direction of blind (1 = down, 0 = stop, -1 = up) int setPos = 0; //The set position 0-100% by the client long currentPosition = 0; //Current position of the blind long maxPosition = 2000000; //Max position of the blind. Initial value boolean loadDataSuccess = false; boolean saveItNow = false; //If true will store positions to SPIFFS bool shouldSaveConfig = false; //Used for WIFI Manager callback to save parameters boolean initLoop = true; //To enable actions first time the loop is run const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution // for your motor Stepper small_stepper(stepsPerRevolution, D1, D2, D3, D4); //Initiate stepper driver WiFiServer server(80); // TCP server at port 80 will respond to HTTP requests WebSocketsServer webSocket = WebSocketsServer(81); // WebSockets will respond on port 81 /**************************************************************************************** Loading configuration that has been saved on SPIFFS. Returns false if not successful */ bool loadConfig() { File configFile = SPIFFS.open("/config.json", "r"); if (!configFile) { Serial.println("Failed to open config file"); return false; } size_t size = configFile.size(); if (size > 1024) { Serial.println("Config file size is too large"); return false; } // Allocate a buffer to store contents of the file. std::unique_ptr<char[]> buf(new char[size]); // We don't use String here because ArduinoJson library requires the input // buffer to be mutable. If you don't use ArduinoJson, you may as well // use configFile.readString instead. configFile.readBytes(buf.get(), size); StaticJsonBuffer<200> jsonBuffer; JsonObject& json = jsonBuffer.parseObject(buf.get()); if (!json.success()) { Serial.println("Failed to parse config file"); return false; } json.printTo(Serial); Serial.println(); //Store variables locally currentPosition = long(json["currentPosition"]); maxPosition = long(json["maxPosition"]); strcpy(config_name, json["config_name"]); strcpy(mqtt_server, json["mqtt_server"]); strcpy(mqtt_port, json["mqtt_port"]); return true; } /** Save configuration data to a JSON file on SPIFFS */ bool saveConfig() { StaticJsonBuffer<200> jsonBuffer; JsonObject& json = jsonBuffer.createObject(); json["currentPosition"] = currentPosition; json["maxPosition"] = maxPosition; json["config_name"] = config_name; json["mqtt_server"] = mqtt_server; json["mqtt_port"] = mqtt_port; File configFile = SPIFFS.open("/config.json", "w"); if (!configFile) { Serial.println("Failed to open config file for writing"); return false; } json.printTo(configFile); Serial.println("Saved JSON to SPIFFS"); json.printTo(Serial); Serial.println(); return true; } /**************************************************************************************** */ /* Connect to MQTT server and publish a message on the bus. Finally, close down the connection and radio */ void sendmsg(String topic, String payload) { if (!mqttActive) return; Serial.println("Trying to send msg..." + topic + ":" + payload); //Send status to MQTT bus if connected if (psclient.connected()) { psclient.publish(topic.c_str(), payload.c_str()); } else { Serial.println("PubSub client is not connected..."); } } /* Connect the MQTT client to the MQTT server */ void reconnect() { if (!mqttActive) return; // Loop until we're reconnected while (!psclient.connected()) { Serial.print("Attempting MQTT connection..."); // Attempt to connect if (psclient.connect(mqttclientid.c_str())) { Serial.println("connected"); //Send register MQTT message with JSON of chipid and ip-address sendmsg("/raw/esp8266/register", "{ \"id\": \"" + String(ESP.getChipId()) + "\", \"ip\":\"" + WiFi.localIP().toString() + "\", \"type\":\"roller blind\", \"name\":\"" + config_name + "\"}"); //Setup subscription psclient.subscribe(inputTopic.c_str()); } else { Serial.print("failed, rc="); Serial.print(psclient.state()); Serial.println(" try again in 5 seconds"); // Wait 5 seconds before retrying ESP.wdtFeed(); delay(5000); } } } /* Common function to get a topic based on the chipid. Useful if flashing more than one device */ String getMqttTopic(String type) { return "/raw/esp8266/" + String(ESP.getChipId()) + "/" + type; } /**************************************************************************************** */ void processMsg(String res, uint8_t clientnum) { /* Check if calibration is running and if stop is received. Store the location */ if (action == "set" && res == "(0)") { maxPosition = currentPosition; saveItNow = true; } /* Below are actions based on inbound MQTT payload */ if (res == "(start)") { /* Store the current position as the start position */ currentPosition = 0; path = 0; saveItNow = true; action = "manual"; } else if (res == "(max)") { /* Store the max position of a closed blind */ maxPosition = currentPosition; path = 0; saveItNow = true; action = "manual"; } else if (res == "(0)") { /* Stop */ path = 0; saveItNow = true; action = "manual"; } else if (res == "(1)") { /* Move down without limit to max position */ path = 1; action = "manual"; } else if (res == "(-1)") { /* Move up without limit to top position */ path = -1; action = "manual"; } else if (res == "(update)") { //Send position details to client int set = (setPos * 100) / maxPosition; int pos = (currentPosition * 100) / maxPosition; sendmsg(outputTopic, "{ \"set\":" + String(set) + ", \"position\":" + String(pos) + " }"); webSocket.sendTXT(clientnum, "{ \"set\":" + String(set) + ", \"position\":" + String(pos) + " }"); } else if (res == "(ping)") { //Do nothing } else { /* Any other message will take the blind to a position Incoming value = 0-100 path is now the position */ path = maxPosition * res.toInt() / 100; setPos = path; //Copy path for responding to updates action = "auto"; int set = (setPos * 100) / maxPosition; int pos = (currentPosition * 100) / maxPosition; //Send the instruction to all connected devices sendmsg(outputTopic, "{ \"set\":" + String(set) + ", \"position\":" + String(pos) + " }"); webSocket.broadcastTXT("{ \"set\":" + String(set) + ", \"position\":" + String(pos) + " }"); } } void webSocketEvent(uint8_t num, WStype_t type, uint8_t * payload, size_t length) { switch (type) { case WStype_TEXT: Serial.printf("[%u] get Text: %s\n", num, payload); String res = (char*)payload; //Send to common MQTT and websocket function processMsg(res, num); break; } } void mqttCallback(char* topic, byte* payload, unsigned int length) { Serial.print("Message arrived ["); Serial.print(topic); Serial.print("] "); String res = ""; for (int i = 0; i < length; i++) { res += String((char) payload[i]); } processMsg(res, NULL); } /** Turn of power to coils whenever the blind is not moving */ void stopPowerToCoils() { digitalWrite(D1, LOW); digitalWrite(D2, LOW); digitalWrite(D3, LOW); digitalWrite(D4, LOW); } /* Callback from WIFI Manager for saving configuration */ void saveConfigCallback () { Serial.println("Should save config"); shouldSaveConfig = true; } void setup(void) { // set the speed at 60 rpm: small_stepper.setSpeed(60); // initialize the serial port: Serial.begin(115200); delay(100); Serial.print("Starting now\n"); //Reset the action action = ""; //Set MQTT properties outputTopic = getMqttTopic("out"); inputTopic = getMqttTopic("in"); mqttclientid = ("ESPClient-" + String(ESP.getChipId())); Serial.println("Sending to Mqtt-topic: " + outputTopic); Serial.println("Listening to Mqtt-topic: " + inputTopic); //Setup MQTT Client ID Serial.println("MQTT Client ID: " + String(mqttclientid)); //Set the WIFI hostname WiFi.hostname(config_name); //Define customer parameters for WIFI Manager WiFiManagerParameter custom_config_name("Name", "Bonjour name", config_name, 40); WiFiManagerParameter custom_mqtt_server("server", "MQTT server (optional)", mqtt_server, 40); WiFiManagerParameter custom_mqtt_port("port", "MQTT port", mqtt_port, 6); //Setup WIFI Manager WiFiManager wifiManager; //reset settings - for testing //clean FS, for testing //SPIFFS.format(); //wifiManager.resetSettings(); wifiManager.setSaveConfigCallback(saveConfigCallback); //add all your parameters here wifiManager.addParameter(&custom_config_name); wifiManager.addParameter(&custom_mqtt_server); wifiManager.addParameter(&custom_mqtt_port); wifiManager.autoConnect(APid.c_str(), APpw.c_str()); //Load config upon start if (!SPIFFS.begin()) { Serial.println("Failed to mount file system"); return; } /* Save the config back from WIFI Manager. This is only called after configuration when in AP mode */ if (shouldSaveConfig) { //read updated parameters strcpy(config_name, custom_config_name.getValue()); strcpy(mqtt_server, custom_mqtt_server.getValue()); strcpy(mqtt_port, custom_mqtt_port.getValue()); //Save the data saveConfig(); } /* Try to load FS data configuration every time when booting up. If loading does not work, set the default positions */ loadDataSuccess = loadConfig(); if (!loadDataSuccess) { currentPosition = 0; maxPosition = 2000000; } /* Setup multi DNS (Bonjour) */ if (!MDNS.begin(config_name)) { Serial.println("Error setting up MDNS responder!"); while (1) { delay(1000); } } Serial.println("mDNS responder started"); // Start TCP (HTTP) server server.begin(); Serial.println("TCP server started"); // Add service to MDNS-SD MDNS.addService("http", "tcp", 80); //Start websocket webSocket.begin(); webSocket.onEvent(webSocketEvent); /* Setup connection for MQTT and for subscribed messages IF a server address has been entered */ if (String(mqtt_server) != "") { Serial.println("Registering MQTT server"); psclient.setServer(mqtt_server, String(mqtt_port).toInt()); psclient.setCallback(mqttCallback); } else { mqttActive = false; Serial.println("NOTE: No MQTT server address has been registered. Only using websockets"); } //Setup OTA { // Authentication to avoid unauthorized updates //ArduinoOTA.setPassword((const char *)"nidayand"); ArduinoOTA.setHostname(config_name); ArduinoOTA.onStart([]() { Serial.println("Start"); }); ArduinoOTA.onEnd([]() { Serial.println("\nEnd"); }); ArduinoOTA.onProgress([](unsigned int progress, unsigned int total) { Serial.printf("Progress: %u%%\r", (progress / (total / 100))); }); ArduinoOTA.onError([](ota_error_t error) { Serial.printf("Error[%u]: ", error); if (error == OTA_AUTH_ERROR) Serial.println("Auth Failed"); else if (error == OTA_BEGIN_ERROR) Serial.println("Begin Failed"); else if (error == OTA_CONNECT_ERROR) Serial.println("Connect Failed"); else if (error == OTA_RECEIVE_ERROR) Serial.println("Receive Failed"); else if (error == OTA_END_ERROR) Serial.println("End Failed"); }); ArduinoOTA.begin(); } } int tripCounter = 0; void loop(void) { //OTA client code ArduinoOTA.handle(); //Websocket listner webSocket.loop(); //MQTT client if (mqttActive) { if (!psclient.connected()) reconnect(); psclient.loop(); } /** Storing positioning data and turns off the power to the coils */ if (saveItNow) { saveConfig(); saveItNow = false; /* If no action is required by the motor make sure to turn off all coils to avoid overheating and less energy consumption */ stopPowerToCoils(); } /** Manage actions. Steering of the blind */ if (action == "auto") { /* Automatically open or close blind */ if (currentPosition > path) { small_stepper.step(-1); currentPosition = currentPosition - 1; } else if (currentPosition < path) { small_stepper.step(1); currentPosition = currentPosition + 1; } else { path = 0; action = ""; int set = (setPos * 100) / maxPosition; int pos = (currentPosition * 100) / maxPosition; webSocket.broadcastTXT("{ \"set\":" + String(set) + ", \"position\":" + String(pos) + " }"); sendmsg(outputTopic, "{ \"set\":" + String(set) + ", \"position\":" + String(pos) + " }"); Serial.println("Stopped. Reached wanted position"); saveItNow = true; } } else if (action == "manual" && path != 0) { /* Manually running the blind */ small_stepper.step(path); currentPosition = currentPosition + path; } /* After running setup() the motor might still have power on some of the coils. This is making sure that power is off the first time loop() has been executed to avoid heating the stepper motor draining unnecessary current */ if (initLoop) { initLoop = false; stopPowerToCoils(); } /** Serving the webpage */ { // Check if a client has connected WiFiClient webclient = server.available(); if (!webclient) { return; } Serial.println("New client"); // Wait for data from client to become available while (webclient.connected() && !webclient.available()) { delay(1); } // Read the first line of HTTP request String req = webclient.readStringUntil('\r'); // First line of HTTP request looks like "GET /path HTTP/1.1" // Retrieve the "/path" part by finding the spaces int addr_start = req.indexOf(' '); int addr_end = req.indexOf(' ', addr_start + 1); if (addr_start == -1 || addr_end == -1) { Serial.print("Invalid request: "); Serial.println(req); return; } req = req.substring(addr_start + 1, addr_end); Serial.print("Request: "); Serial.println(req); webclient.flush(); String s; if (req == "/") { s = "HTTP/1.1 200 OK\r\nContent-Type: text/html\r\n\r\n<!DOCTYPE html><html><head> <meta http-equiv=\"Cache-Control\" content=\"no-cache, no-store, must-revalidate\"/> <meta http-equiv=\"Pragma\" content=\"no-cache\"/> <meta http-equiv=\"Expires\" content=\"0\"/> <title>{NAME}</title> <link rel=\"stylesheet\" href=\"https://unpkg.com/onsenui/css/onsenui.css\"> <link rel=\"stylesheet\" href=\"https://unpkg.com/onsenui/css/onsen-css-components.min.css\"> <script src=\"https://unpkg.com/onsenui/js/onsenui.min.js\"></script> <script src=\"https://unpkg.com/jquery/dist/jquery.min.js\"></script> <script>var cversion=\"{VERSION}\"; var wsUri=\"ws://\"+location.host+\":81/\"; var repo=\"motor-on-roller-blind-ws\"; window.fn={}; window.fn.open=function(){var menu=document.getElementById('menu'); menu.open();}; window.fn.load=function(page){var content=document.getElementById('content'); var menu=document.getElementById('menu'); content.load(page) .then(menu.close.bind(menu)).then(setActions());}; var gotoPos=function(percent){doSend(percent);}; var instr=function(action){doSend(\"(\"+action+\")\");}; var setActions=function(){doSend(\"(update)\"); $.get(\"https://api.github.com/repos/nidayand/\"+repo+\"/releases\", function(data){if (data.length>0 && data[0].tag_name !==cversion){$(\"#cversion\").text(cversion); $(\"#nversion\").text(data[0].tag_name); $(\"#update-card\").show();}}); setTimeout(function(){$(\"#arrow-close\").on(\"click\", function(){$(\"#setrange\").val(100);gotoPos(100);}); $(\"#arrow-open\").on(\"click\", function(){$(\"#setrange\").val(0);gotoPos(0);}); $(\"#setrange\").on(\"change\", function(){gotoPos($(\"#setrange\").val())}); $(\"#arrow-up-man\").on(\"click\", function(){instr(\"-1\")}); $(\"#arrow-down-man\").on(\"click\", function(){instr(\"1\")}); $(\"#arrow-stop-man\").on(\"click\", function(){instr(\"0\")}); $(\"#set-start\").on(\"click\", function(){instr(\"start\")}); $(\"#set-max\").on(\"click\", function(){instr(\"max\");});}, 200);}; $(document).ready(function(){setActions();}); var websocket; var timeOut; function retry(){clearTimeout(timeOut); timeOut=setTimeout(function(){websocket=null; init();},5000);}; function init(){ons.notification.toast({message: 'Connecting...', timeout: 1000}); try{websocket=new WebSocket(wsUri); websocket.onclose=function (){}; websocket.onerror=function(evt){ons.notification.toast({message: 'Cannot connect to device', timeout: 2000}); retry();}; websocket.onopen=function(evt){ons.notification.toast({message: 'Connected to device', timeout: 2000}); setTimeout(function(){doSend(\"(update)\");}, 1000);}; websocket.onclose=function(evt){ons.notification.toast({message: 'Disconnected. Retrying', timeout: 2000}); retry();}; websocket.onmessage=function(evt){try{var msg=JSON.parse(evt.data); if (typeof msg.position !=='undefined'){$(\"#pbar\").attr(\"value\", msg.position);}; if (typeof msg.set !=='undefined'){$(\"#setrange\").val(msg.set);};}catch(err){}};}catch (e){ons.notification.toast({message: 'Cannot connect to device. Retrying...', timeout: 2000}); retry();};}; function doSend(msg){if (websocket && websocket.readyState==1){websocket.send(msg);}}; window.addEventListener(\"load\", init, false); window.onbeforeunload=function(){if (websocket && websocket.readyState==1){websocket.close();};}; </script></head><body><ons-splitter> <ons-splitter-side id=\"menu\" side=\"left\" width=\"220px\" collapse swipeable> <ons-page> <ons-list> <ons-list-item onclick=\"fn.load('home.html')\" tappable> Home </ons-list-item> <ons-list-item onclick=\"fn.load('settings.html')\" tappable> Settings </ons-list-item> <ons-list-item onclick=\"fn.load('about.html')\" tappable> About </ons-list-item> </ons-list> </ons-page> </ons-splitter-side> <ons-splitter-content id=\"content\" page=\"home.html\"></ons-splitter-content></ons-splitter><template id=\"home.html\"> <ons-page> <ons-toolbar> <div class=\"left\"> <ons-toolbar-button onclick=\"fn.open()\"> <ons-icon icon=\"md-menu\"></ons-icon> </ons-toolbar-button> </div><div class=\"center\">{NAME}</div></ons-toolbar><ons-card> <div class=\"title\">Adjust position</div><div class=\"content\"><p>Move the slider to the wanted position or use the arrows to open/close to the max positions</p></div><ons-row> <ons-col width=\"40px\" style=\"text-align: center; line-height: 31px;\"> </ons-col> <ons-col> <ons-progress-bar id=\"pbar\" value=\"75\"></ons-progress-bar> </ons-col> <ons-col width=\"40px\" style=\"text-align: center; line-height: 31px;\"> </ons-col> </ons-row> <ons-row> <ons-col width=\"40px\" style=\"text-align: center; line-height: 31px;\"> <ons-icon id=\"arrow-open\" icon=\"fa-arrow-up\" size=\"2x\"></ons-icon> </ons-col> <ons-col> <ons-range id=\"setrange\" style=\"width: 100%;\" value=\"25\"></ons-range> </ons-col> <ons-col width=\"40px\" style=\"text-align: center; line-height: 31px;\"> <ons-icon id=\"arrow-close\" icon=\"fa-arrow-down\" size=\"2x\"></ons-icon> </ons-col> </ons-row> </ons-card> <ons-card id=\"update-card\" style=\"display:none\"> <div class=\"title\">Update available</div><div class=\"content\">You are running <span id=\"cversion\"></span> and <span id=\"nversion\"></span> is the latest. Go to <a href=\"https://github.com/nidayand/motor-on-roller-blind-ws/releases\">the repo</a> to download</div></ons-card> </ons-page></template><template id=\"settings.html\"> <ons-page> <ons-toolbar> <div class=\"left\"> <ons-toolbar-button onclick=\"fn.open()\"> <ons-icon icon=\"md-menu\"></ons-icon> </ons-toolbar-button> </div><div class=\"center\"> Settings </div></ons-toolbar> <ons-card> <div class=\"title\">Instructions</div><div class=\"content\"> <p> <ol> <li>Use the arrows and stop button to navigate to the top position i.e. the blind is opened</li><li>Click the START button</li><li>Use the down arrow to navigate to the max closed position</li><li>Click the MAX button</li><li>Calibration is completed!</li></ol> </p></div></ons-card> <ons-card> <div class=\"title\">Control</div><ons-row style=\"width:100%\"> <ons-col style=\"text-align:center\"><ons-icon id=\"arrow-up-man\" icon=\"fa-arrow-up\" size=\"2x\"></ons-icon></ons-col> <ons-col style=\"text-align:center\"><ons-icon id=\"arrow-stop-man\" icon=\"fa-stop\" size=\"2x\"></ons-icon></ons-col> <ons-col style=\"text-align:center\"><ons-icon id=\"arrow-down-man\" icon=\"fa-arrow-down\" size=\"2x\"></ons-icon></ons-col> </ons-row> </ons-card> <ons-card> <div class=\"title\">Store</div><ons-row style=\"width:100%\"> <ons-col style=\"text-align:center\"><ons-button id=\"set-start\">Set Start</ons-button></ons-col> <ons-col style=\"text-align:center\"> </ons-col> <ons-col style=\"text-align:center\"><ons-button id=\"set-max\">Set Max</ons-button></ons-col> </ons-row> </ons-card> </ons-page></template><template id=\"about.html\"> <ons-page> <ons-toolbar> <div class=\"left\"> <ons-toolbar-button onclick=\"fn.open()\"> <ons-icon icon=\"md-menu\"></ons-icon> </ons-toolbar-button> </div><div class=\"center\"> About </div></ons-toolbar> <ons-card> <div class=\"title\">Motor on a roller blind</div><div class=\"content\"> <p> <ul> <li>3d print files and instructions: <a href=\"https://www.thingiverse.com/thing:2392856\">https://www.thingiverse.com/thing:2392856</a></li><li>MQTT based version on Github: <a href=\"https://github.com/nidayand/motor-on-roller-blind\">https://github.com/nidayand/motor-on-roller-blind</a></li><li>WebSocket based version on Github: <a href=\"https://github.com/nidayand/motor-on-roller-blind-ws\">https://github.com/nidayand/motor-on-roller-blind-ws</a></li><li>Licensed unnder <a href=\"https://creativecommons.org/licenses/by/3.0/\">Creative Commons</a></li></ul> </p></div></ons-card> </ons-page></template></body></html>\r\n\r\n"; s.replace("{VERSION}", "V" + version); s.replace("{NAME}", String(config_name)); Serial.println("Sending 200"); } else { s = "HTTP/1.1 404 Not Found\r\n\r\n"; Serial.println("Sending 404"); } //Print page but as max package is 2048 we need to break it down while (s.length() > 2000) { String d = s.substring(0, 2000); webclient.print(d); s.replace(d, ""); } webclient.print(s); } }
Torque
Torque is relatively difficult to measure, which is apt to permit a proliferation of specs on the web that are incomplete and highly suspect. I set up a crude apparatus to get a ballpark estimate of torque from these motors, running at different supply voltages. The apparatus consists of a support for the motor, an arm mounted to the motor shaft, and on the end of the arm (at 10cm from the shaft) a basket into which can be placed weights. I used recent US one-cent coins, which weight 2.5g, and also weighed the various loads on a digital scale.
With this we can make two measurements:
-
- Pull-in torque: Max torque that the motor can exert when commanded to advance from one position to the next. To test this, with the arm horizontal we place a load in the basket and command the motor to lift it. We increase the load until the motor misses steps upon lifting.
- Holding or pull-out torque. With the motor stationary and the arm horizontal, we add weight to the basket until the motor can no longer support it. This is generally a much higher torque value than the pull-in torque.
The torque values will be in units of gram-force * cm (g-f * cm). Since the basket is located on the arm at 10cm from the motor shaft, a 15g weight corresponds to 10*15 = 150 g-f * cm of torque.
I repeated the measurements several times, in both directions (the weight on one or other end of the arm). The results shown below aren’t statistically solid (only one 12V sample motor), but are perhaps representative, and are certainly interesting to compare to the spec listed.
Note that these are very low speed measurements. At higher speeds, pull-in torque reduces due to there being less time per step for the change in current to “overcome” the winding inductance and reach its full value. The default torque is 300gcm, when its connected as a unipolar motor (default). But when we connect the motor as described above as a bipolar motor we get a stunning:
800gcm
which is at least twice as much as full stepping unipolar (380gcm) and almost 3x more powerful than my half stepping unipolar test (300gcm).
TESTING FASE
After installing my blind with the standard 12V 28BYJ-48 Stepper Motor in bipolar setup. It works once again kindoff… because the motor isn’t strong enough now it has more torque. So I’ve ordered a new Motor, and I’am going to replaced the standard one.

So back to the drawing board and figure a way out to get this thing working with bigger blinds. Want to see if or how to fix this problem, come back soon, for part three!
![]()
DOWNLOAD ALL FILES FOR THIS PROJECT ON GITHUB.

AND DOWNLOAD THEM FORM THINGIVERSE HERE.
DO YOU HAVE ANY QUESTIONS? LEAVE A COMMENT DOWN BELOW!
Reference:
Peter nidayand ( Okt 4, 2017) motor-on-roller-blind, WebSocket based version of motor-on-roller-blind, https://github.com/nidayand/motor-on-roller-blind ; Thomas O Fredericks (Nov 21, 2016), Stepper 28BYJ_48 UL2003 Library for Arduino/Wiring, Stepper Library for 5V Stepper Motors 28BYJ-48 with ULN2003 Driver, https://github.com/thomasfredericks/Stepper_28BYJ_48; ESP8266 Community Forum (Dec 18, 2017), Arduino core for ESP8266 WiFi chip, Support for ESP8266 chip to the Arduino environment. , https://github.com/esp8266/Arduino ; Nick O’Leary (Jun 7, 2017), Arduino Client for MQTT, This library provides a client for doing simple publish/subscribe messaging with a server that supports MQTT., https://github.com/knolleary/pubsubclient; Tzapu (Aug 22, 2017), WiFiManager, ESP8266 WiFi Connection manager with fallback web configuration portal,https://github.com/tzapu/WiFiManager; Benoît Blanchon (Dec 15, 2017), ArduinoJson, ArduinoJson is a C++ JSON library for Arduino and IoT (Internet Of Things), https://github.com/bblanchon/ArduinoJson; Markus ( Okt 16, 2017), arduinoWebSockets, a WebSocket Server and Client for Arduino based on RFC6455., https://github.com/Links2004/arduinoWebSockets Sebastian Raff (APR 25 2018), Homekit2MQTT, Use to control a MQTT-connected “Thing” in your home automation through Siri and with HomeKit apps., https://github.com/hobbyquaker/homekit2mqtt